

Reverse time migration (RTM) has become the industry-preferred pre-stack depth migration method for illuminating complex geologic structures and potential reservoirs.
- The most accurate and amplitude-preserving depth imaging solution, able to image overturned dips
- Proprietary ISIC imaging condition enables remarkably clear image gathers and migrated stacks
- Handles the most complex geologic settings and works for all marine acquisition geometries
- Pre-stack outputs can be decomposed by both angle and azimuth, allowing improved imaging or use within high-resolution 3D reflection tomography for velocity model building
- RTM wave-propagation engine is common to FWI (inversion for velocity models), PGS Ultima (simultaneous inversion for velocity and reflectivity models), SWIM (imaging of multiples) and full wavefield migration (simultaneous imaging of both multiples and primaries)
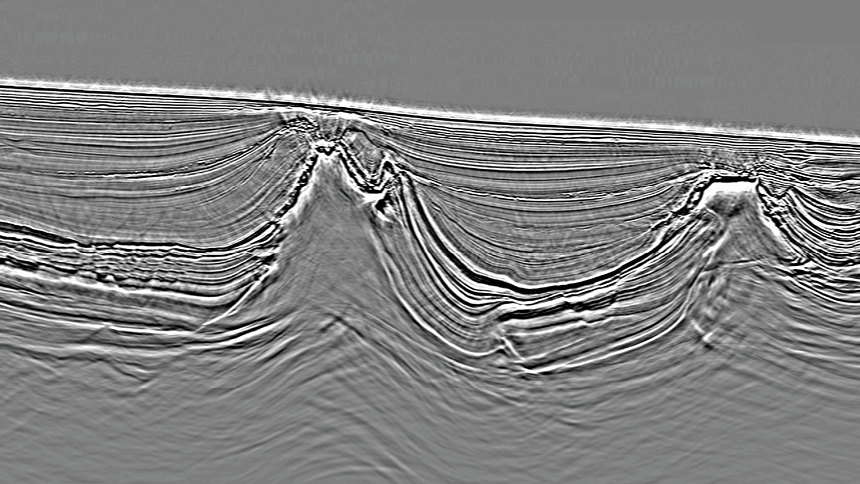
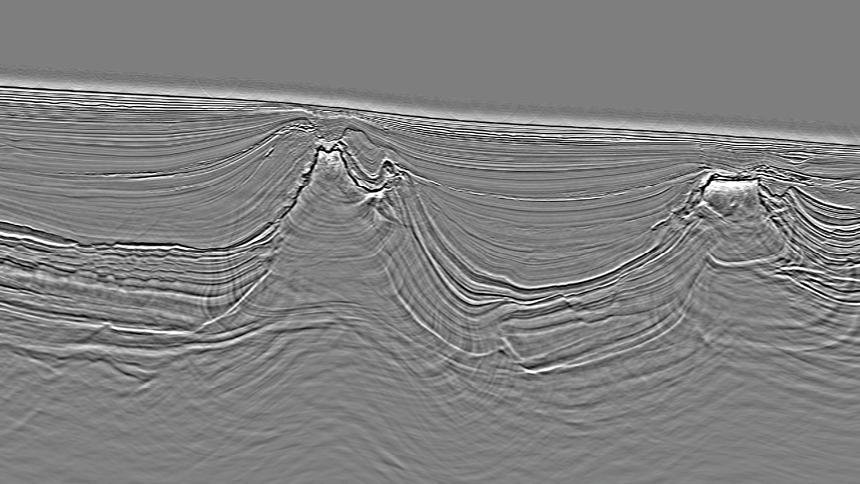
The PGS RTM solution can image steep dips, overhangs, and other complex structural settings. A proprietary inverse scattering imaging condition (ISIC) suppresses traditional RTM artifacts and delivers clean pre-stack angle gathers and migrated stacks. All marine acquisition geometries can be accommodated, and imaging can be both viscoacoustic (amplitude and phase corrections for absorption effects) and correct for orthorhombic anisotropy effects.
Pre-Stack Angle and Azimuth Flexibility
Our RTM solution enables the production of true amplitude azimuth-sectored angle gathers (TA3Gs) that can be used for post-migration processing of partial images to enhance the signal-to-noise ratio and minimize the artifacts in the final stack (see figure below). TA3Gs gathers can be reliably employed for amplitude-versus-angle (AVA) analyses and residual velocity model refinements.
Contact a PGS expert
If you have a question related to our Imaging & Characterization services or would like to request a quotation, please get in touch.