

There are many dynamic forces that can mask subtle reservoir signals, but a series of engineering innovations render PGS 4D GeoStreamer surveys relatively insensitive to them.
- Better repeatability with advanced source and streamer steering
- Better sampling and increased resolution with more streamers and denser spreads
- Increased detectability with reduced noise due to deep tow and effective sea-surface noise removal
Advanced steering of in-sea equipment maximizes the likelihood that all source and receiver positions in a 4D baseline survey can be repeated in each monitor survey. Deep-towed multisensor streamers are highly effective at reducing 4D noise from the sea surface.
Challenges to Repeatability
If the source and receiver positions used to acquire a 4D baseline survey are exactly repeated in the 4D monitor survey, it follows that most of the difference observed in the seismic response (the ‘4D seismic difference result’) is related to changes in the physical state of the reservoir during the production interval between the acquisitions of each survey. Alternatively, ‘4D noise’ increasingly contaminates all of the 4D difference results as the source and receiver positions increasingly deviate between the 4D baseline and monitor surveys. If no reservoir production occurred, the ‘non-repeatability’ of the seismic data should be minimal when the source and receiver positions are unchanged: any seismic differences are likely to be random.
The other sources of ‘non-repeatability’ in 4D data arise from dynamic sea state changes during each 4D survey, changes in the water column that affect the speed of sound (salinity, temperature, etc.) between each survey, differences in the environmental noise, changes in the acquisition systems, changes in the source and receiver depths, and so on. Also, as the individual air gun elements suspended below each source array move around in response to sea-surface and drag forces during towing, and the bubble energy for each shot is dynamic as it rises to the surface, shot-to-shot variations in the emitted source wavefield also contribute to non-repeatability in the 4D signal.
Physical steering technologies applied to each towed source sub-array and applied to densely-spaced dual-sensor streamers are described below; collectively managed by accurate navigation and acoustic positioning systems. When complemented by ‘overlap’ streamers to maximize receiver redundancy, the combined high-density 4D (HD4D) steerable source and streamer network demonstrably provides the most accurate and robust 4D survey repeatability. In practice, good 4D survey management minimizes (|dR| + |dS|) for each offset class of each common midpoint (CMP) seismic trace (the ‘combined source and receiver position error’), where dR is the error between the respective 4D baseline and monitor receiver positions, and dS is the error between the respective 4D baseline and monitor source positions.
It is demonstrated how -sensor streamers can be towed deep in a low noise environment without being affected by traditional ghost effects, and in a manner that mitigates how variations in sea state affect the recorded seismic wavefield at each receiver location. A signal processing solution known as wavefield separation provides the highest fidelity 4D data platform, as well as enabling backward-compatibility to legacy hydrophone-only baseline acquired with shallow streamer depths. Recent developments in calibrated shot-by-shot source signature measurement also mitigate how variations in sea state affect the emitted seismic wavefield at each shot location.
The figure below schematically illustrates that as the combined source and receiver position error for each offset class of each CMP trace decreases, so will the normalized RMS (NRMS) amplitude error observed between each respective 4D baseline and monitor trace. This NRMS amplitude difference is regarded as the ‘4D noise’ that is unrelated to physical changes in the reservoir state due to depletion or enhanced recovery efforts. Furthermore, the NRMS amplitude difference for a given combined source and receiver position error will decrease as various aforementioned dynamic noise sources decrease.
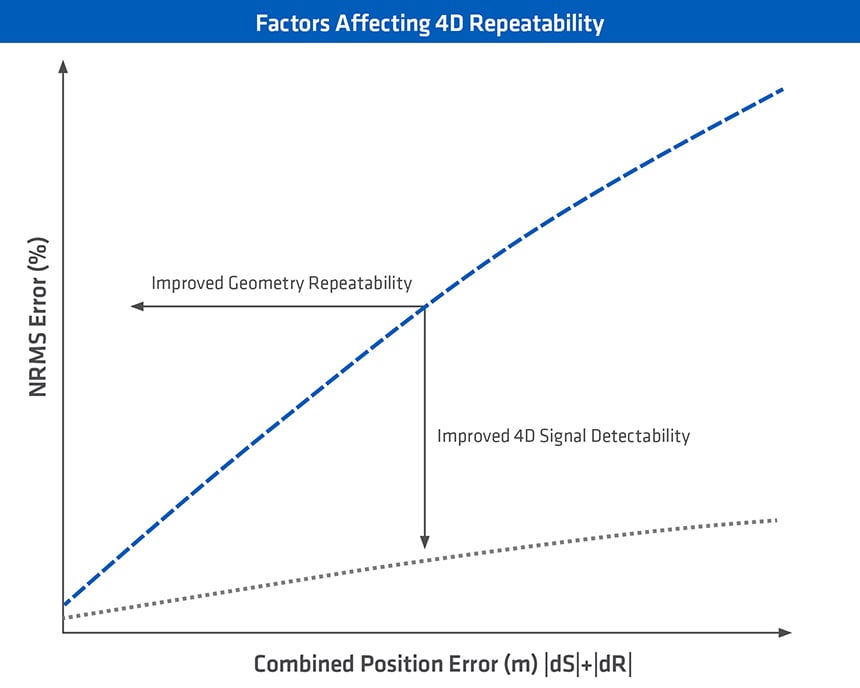 Schematic illustration of the relationship between the NRMS amplitude error and the combined source and receiver position error during 4D projects. The detectability of weak 4D signals improves as the level of 4D noise is decreased for a given source and receiver position error.
Schematic illustration of the relationship between the NRMS amplitude error and the combined source and receiver position error during 4D projects. The detectability of weak 4D signals improves as the level of 4D noise is decreased for a given source and receiver position error.
Solutions to Acquisition Geometry Errors
The ability to accurately control all source and receiver positions during towed streamer operations begins with precise knowledge of all their positions during every show. In a modern seismic vessel fleet such as that operated by PGS, a dense acoustic network positioning system links the precise locations of the vessel, each paravane, each source sub-array, and locations along each streamer for every shot. This acoustic positioning network is integrated with digital-global-positioning-system (DGPS) units mounted on the vessel, each paravane, each source sub-array (two GPS towers per sub-array), and the rear of each GeoStreamer. The collective streamer positioning (SPOS) system is interfaced onboard each PGS vessel with a navigation command and control system and is used to control both the depth and lateral control devices mounted along each (multisensor) streamer and the gun steering system (GSS) mounted on each source sub-array.
Over a decade ago PGS started developing steering capability for every one of the six source sub-arrays towed several hundred meters behind each Ramform vessel workhorse to provide the freedom for each sub-array to steer itself along survey pre-plot lines whilst the vessel steers to optimize the streamer spread locations (a large object towing a far more massive object with considerable towing forces involved: 18 000 kW of thrust power and up to 303 tons of bollard pull per Titan-class vessel). The steering devices shown in the figure below enable fully automated steering where each sub-array can move laterally up to ± 40 m from the natural towing position: more than the width of a regulation soccer pitch. In calibrated testing, the mean lateral source position error from the target trajectory is less than ± 2 m.
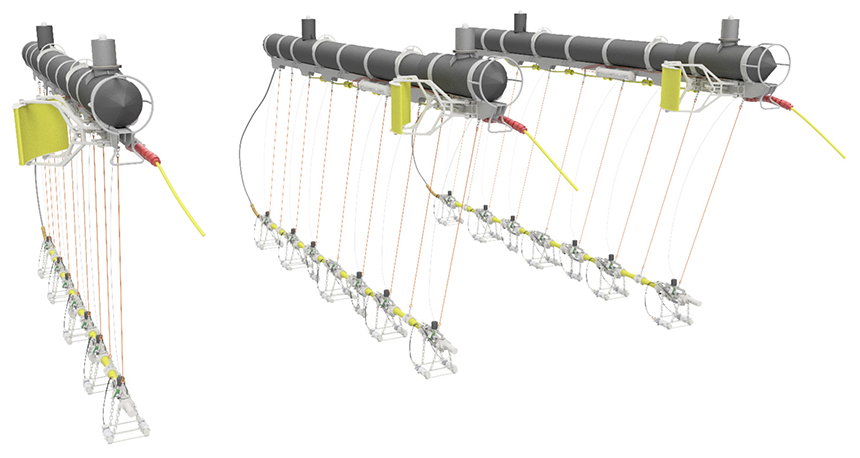 Automated Source Steering System (SSS) steering wings on each PGS source sub-array enable ± 40 m lateral steering range for each source array—translating to typical source position errors of less than ± 2 m during 4D survey matching of previous source positions. Two DGPS towers on each sub-array enable precise positions to be computed for every air gun location during each shot.
Automated Source Steering System (SSS) steering wings on each PGS source sub-array enable ± 40 m lateral steering range for each source array—translating to typical source position errors of less than ± 2 m during 4D survey matching of previous source positions. Two DGPS towers on each sub-array enable precise positions to be computed for every air gun location during each shot.
Our proprietary streamer steering solution, developed in partnership with Kongsberg, offers both depth and lateral steering control. Attention was given to building a fully integrated, low-diameter streamer system that does not cause drag or turbulence effects at the bird location, and is low-noise even under vessel line turning conditions. Streamer feathering can typically be controlled in an automated manner within ± 3°. The use of a very dense and large array of streamers, a Ramform vessel hallmark, also ensures the maximum availability of CMP offset class traces for matching the source and receiver positions during 4D data processing. Furthermore, the towing of additional ‘overlap’ streamers outside the nominal streamer spread ensures that CMP fold at all offset classes is preserved whenever streamer feathering affects the longer offsets.
The figure below shows a real 4D monitor survey vessel pre-plot, where the color scale represents the average lateral-source-position error controlled by the source-steering management system. The inline-source-position error is influenced by the source-firing-time error at each baseline-shot-position and is usually small. For PGS 4D surveys, more than 90% of radial shot-position errors are typically less than 4 m.
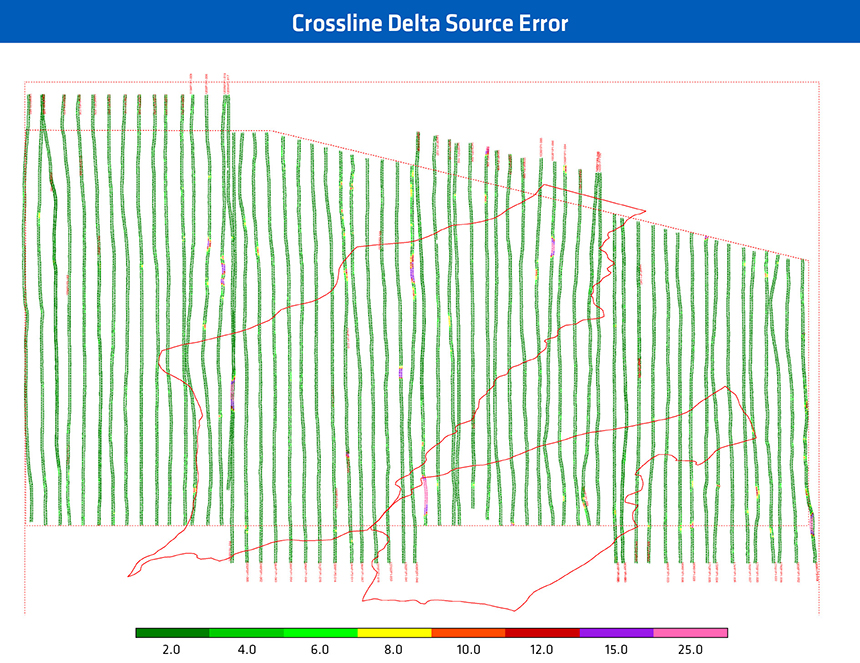 4D monitor survey shot positions color-coded by the lateral source position error from the 4D baseline shot positions.
4D monitor survey shot positions color-coded by the lateral source position error from the 4D baseline shot positions.
Working as an integrated system, the 4D position error for each monitor survey is minimized for each CMP offset class trace using the following strategy:
- The vessel steers in a manner that guides the front of the streamer spread along the baseline trajectory, and is complemented at longer offsets by dense streamer spreads with automated streamer steering, and
- Automated source array steering to match the baseline source positions
Solutions to Sea-State Variation
The use of flat streamer depth profiles ensures that the seismic wavefield has consistent spatial and temporal signal properties everywhere, which is important for any trace interpolation fidelity during data regularization, and for the accuracy of trace matching during 4D binning in processing. By the use of multi-sensor streamers, flexibility is introduced into how the front end of streamers can be configured to reduce drag, streamer tension, and associated mechanical noise, however, by using dual-sensor streamers. Wavefield separation enables dual-sensor streamers to be towed very deep where they are much less sensitive to noise from sea swell and environmental forces, and ghost-free data can be isolated in a manner that is AVO and phase-compliant overall frequencies of interest, and in a manner that is insensitive to local streamer depth variations or local sea-surface height variations.
Dynamic changes in sea-surface height and shape affect each recorded shot gather: the ‘imprint’ of the sea-surface (the down-going ‘ghost’ pressure wavefield) is embedded throughout all two-way time (TWT) and cannot be removed using signal processing of hydrophone-only streamers. In contrast, wavefield separation of multisensor streamer data enables the ghost-free up-going pressure wavefield (‘P-UP’) to be isolated without any imprint of the down-going pressure wavefield (‘P-DWN’); as shown in the figure below. Correspondingly, the next figure shows that 4D differencing of P-UP baseline and P-UP monitor data contains no 4D noise associated with dynamic sea-surface effects, whereas 4D noise will dominate the difference result, masking any reservoir signals if either/both the baseline or monitor surveys contain P-DWN wavefield effects. The use of P-UP for 4D differencing not only recovers the frequencies in the receiver ghost notches but also preserves the most repeatable part of the seismic signal.
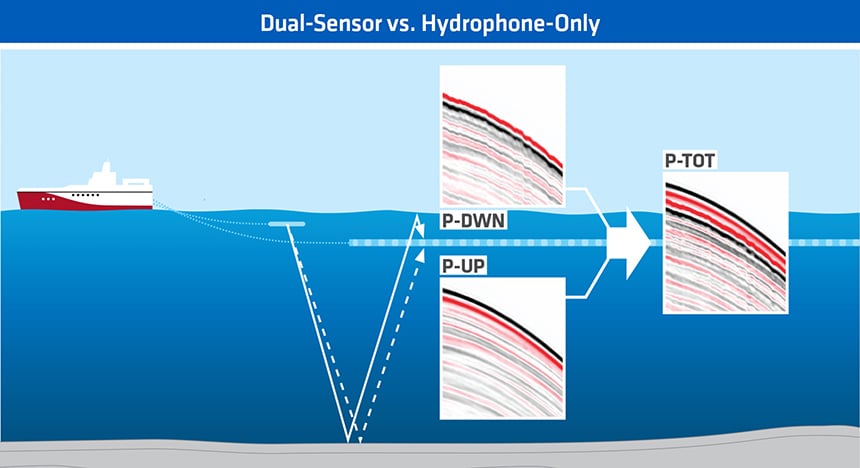 Schematic illustration of multisensor wavefield separation. Hydrophone-only streamers record total pressure wavefield (‘P-TOT’) data that is the summation of the ghost-free up-going pressure wavefield (‘P-UP’) and the ‘ghost’ down-going pressure wavefield (‘P-DWN’). P-DWN contains the dynamic imprint of the free-surface of the ocean; introducing 4D noise and degrading signal resolution. Multisensor streamer data can isolate P-UP and remove P-DWN, thereby providing the best platform for improving 4D signal detection.
Schematic illustration of multisensor wavefield separation. Hydrophone-only streamers record total pressure wavefield (‘P-TOT’) data that is the summation of the ghost-free up-going pressure wavefield (‘P-UP’) and the ‘ghost’ down-going pressure wavefield (‘P-DWN’). P-DWN contains the dynamic imprint of the free-surface of the ocean; introducing 4D noise and degrading signal resolution. Multisensor streamer data can isolate P-UP and remove P-DWN, thereby providing the best platform for improving 4D signal detection.
Of particular relevance where the 4D baseline survey has been acquired with hydrophone-only streamers—typically with shallow towing depth to reduce the free-surface ghost effects upon higher frequencies—the P-UP ghost-free wavefield from a 4D monitor survey with deep towing depth can be accurately redatumed for backward compatibility.
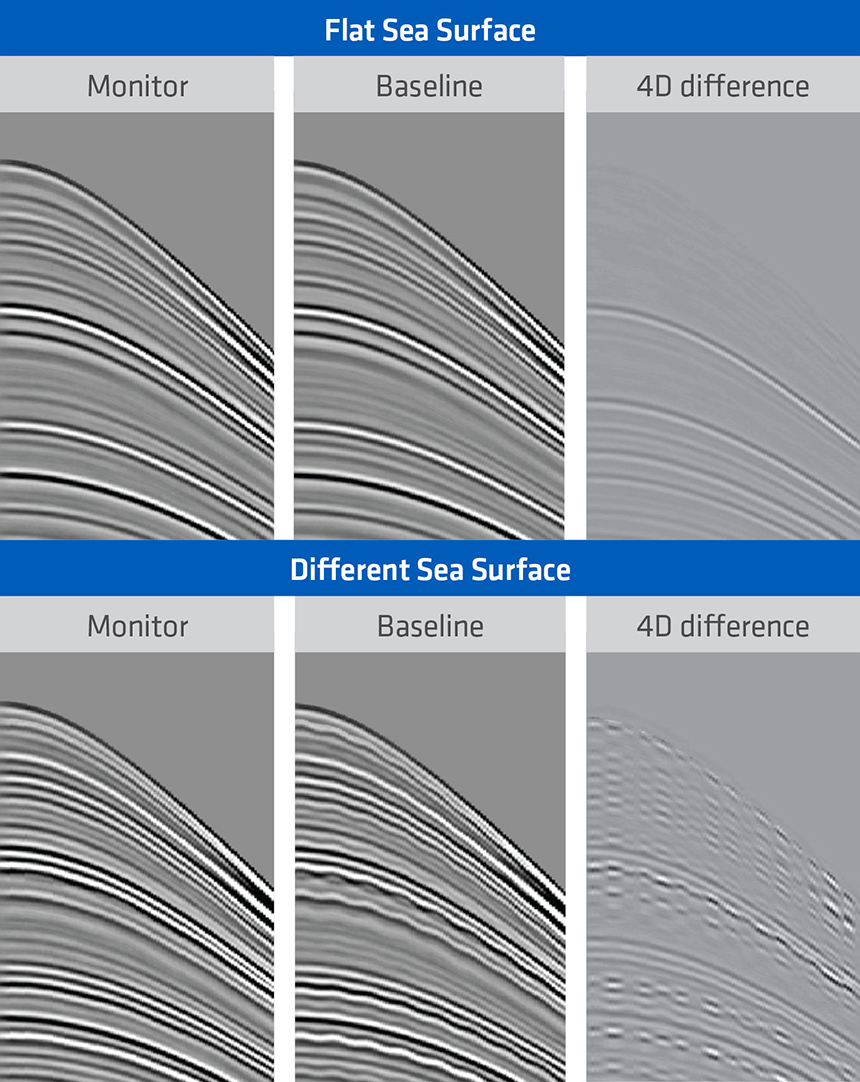 Upper image: when P-UP data is available for both the 4D baseline and monitor surveys the 4D difference result will reveal the 4D signal response to changes in reservoir state with minimum 4D noise and maximum detectability; Lower image: when sea-state variability affects one or both of the baseline and monitor surveys (i.e. P-DWN is included in the data) the 4D difference result is contaminated by 4D noise and the 4D signal response to changes in reservoir state has lower detectability.
Upper image: when P-UP data is available for both the 4D baseline and monitor surveys the 4D difference result will reveal the 4D signal response to changes in reservoir state with minimum 4D noise and maximum detectability; Lower image: when sea-state variability affects one or both of the baseline and monitor surveys (i.e. P-DWN is included in the data) the 4D difference result is contaminated by 4D noise and the 4D signal response to changes in reservoir state has lower detectability.
Solutions to Source Wavefield Variation
For more than two decades, near-field hydrophone recordings have been used during each shot to estimate the ‘notional source signature’ at each air gun location, but the implementation has historically been overly-simplistic when attempting to derive the far-field source signature for each shot. Approximations made include assumptions that the sea-surface is flat, often neglecting vessel and air bubble relative motion or making the assumptions that air bubbles move through the water with constant rise velocity, and no data used about the true relative spatial location of each air gun during the firing of each shot. In fact, the sea-surface is rough and dynamic (as discussed earlier), bubble movement is non-linear and highly dynamic, and drag forces combined with sea-surface height changes may cause the relative separation between the air guns to vary by tens of centimeters between each shot.
Also, the ability to build accurate models of the viscoelastic behavior of bubbles and the emitted source wavefield is essential for any source monitoring system where calibration of recorded near-field hydrophone data is required. A decade of ‘broadband’ seismic development by the oil industry has revealed that the low frequency (2-6 Hz) accuracy of legacy source modeling software was unacceptable for such pursuits.
Modern best practice air gun source modeling and monitoring include the following considerations:
- Developing and implementing new physical descriptions of non-linear bubble behavior and the emitted source wavefield characteristics—notably at low frequencies. Comparison of modeled far-field signatures to calibrated measurements is now accurate over all frequencies.
- Developing an entirely new proprietary source monitoring and QC system that integrates a large number of complementary systems (source sub-array separation and steering control, positioning, and environmental monitoring), records sophisticated source diagnostics, has unlimited fiber-optic telemetry bandwidth, and enables the independent firing and recording of data from each individual air gun.
The figure below shows how the variability in estimated source signatures for 500 consecutive shots increases with deteriorating sea state. The use of accurate source signatures in signal processing will reduce noise that masks the 4D signal.
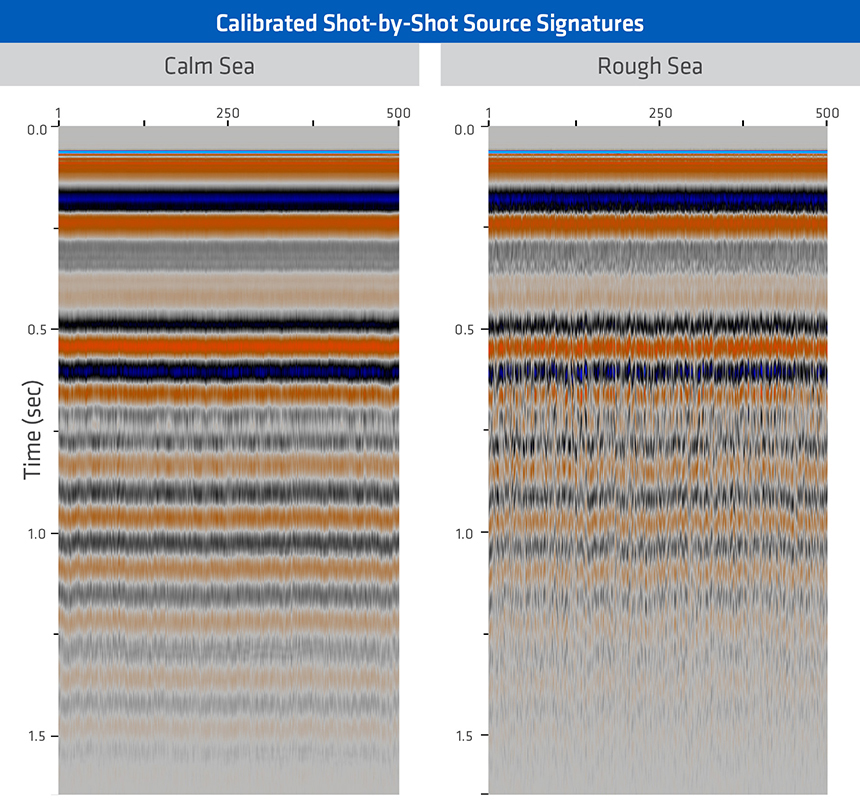 500 sequential shot-by-shot far-field signatures for mild sea-state (left), and rough sea-state (right).
500 sequential shot-by-shot far-field signatures for mild sea-state (left), and rough sea-state (right).
Maximizing Repeatability and Detectability
A series of engineering innovations allow the towed streamer seismic data acquired during any 4D monitor survey to be relatively insensitive to the many dynamic forces that traditionally mask subtle reservoir signals. Most notably, independent steering of each source sub-array and the streamer spread, calibrated to an integrated acoustic network and DGPS positioning system, maximize the likelihood that all source and receiver positions in a 4D baseline survey can be repeated in each 4D monitor survey—particularly when a dense spread of multisensor streamers is towed with additional overlap streamers. A direct correlation is always observed between smaller combined source and receiver position error versus 4D noise.
The level of 4D noise for a given combined source and receiver position error can then be reduced by limiting the exposure of the acquisition system to dynamic sea-state and environmental noise during survey acquisition, thereby improving 4D signal detectability. Deep towing of multisensor streamers enables the sea-state effects to be removed while maximizing signal bandwidth. Furthermore, variability in the emitted source wavefield is removed using calibrated shot-by-shot source signatures.
Contact a PGS expert
If you have a question related to our Marine Acquisition services or would like to request a quotation, please get in touch.